| Robot 1- Robocon 2022 | Robot 2- Robocon 2022 |
|---|---|
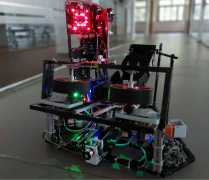 The task of the robot was to throw the type 1 Balls to break the lagori. and to target the opponents Ball on head. The Robot was semi automatic with full automatic mode. I was responsible for the programming and electronics of the robot. We used ARM M7 based microcontroller Teensy 4.1. This Robot is a complete closed loop system with an active feedback to each mechanism. I was the operator of this robot in the official Competition. The task of the robot was to throw the type 1 Balls to break the lagori. and to target the opponents Ball on head. The Robot was semi automatic with full automatic mode. I was responsible for the programming and electronics of the robot. We used ARM M7 based microcontroller Teensy 4.1. This Robot is a complete closed loop system with an active feedback to each mechanism. I was the operator of this robot in the official Competition. | 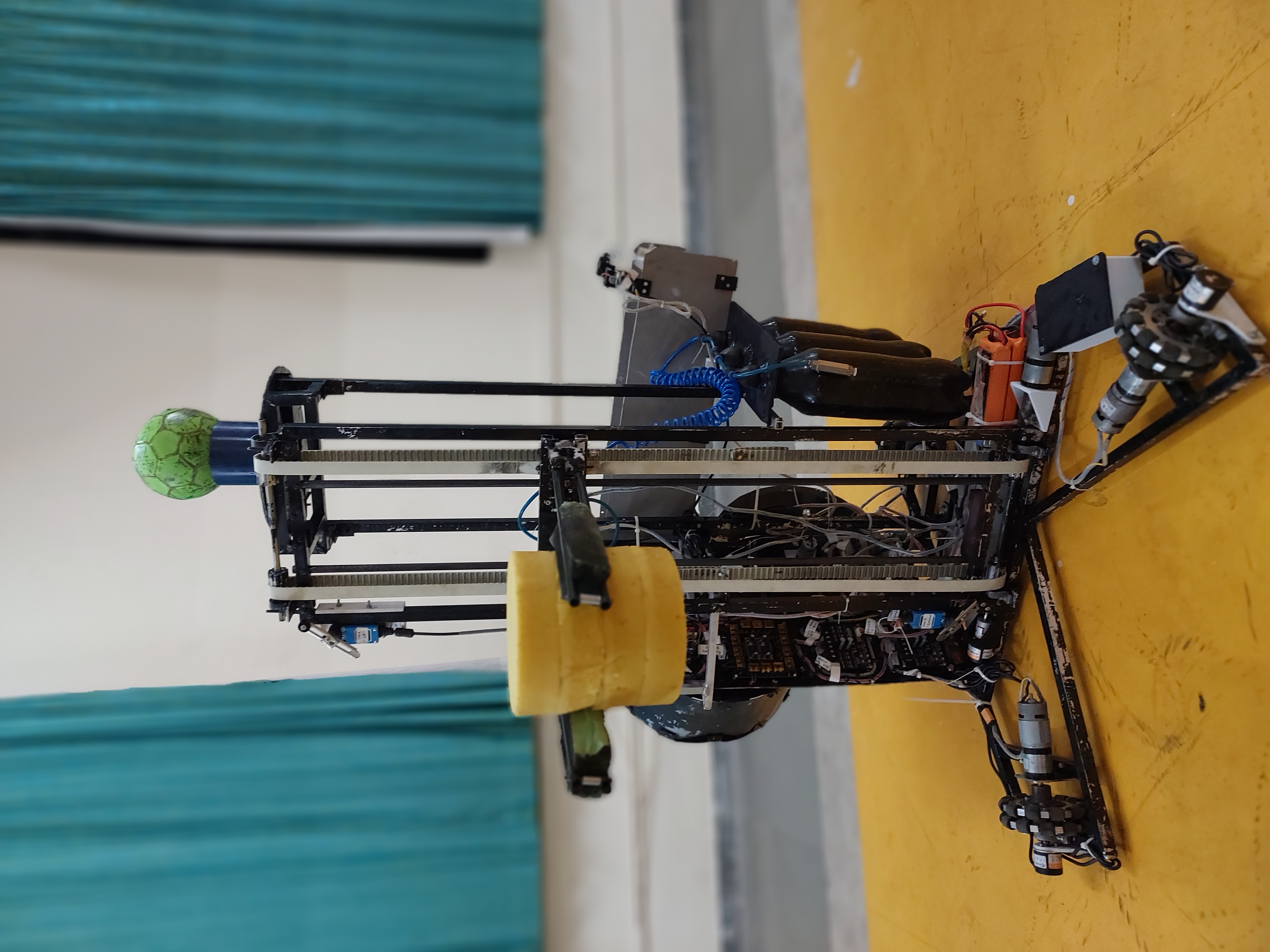 This robot was designed for the theme of Robocon 2022, the task of the robot was to pile with broken lagori while balancing the ball on head. The Robot was semi automatic with full automatic mode. I was responsible for the programming and electronics of the robot. We used ARM M7 based microcontroller Teensy 4.1. This Robot is a complete closed loop system with an active feedback to each mechanism. This robot was designed for the theme of Robocon 2022, the task of the robot was to pile with broken lagori while balancing the ball on head. The Robot was semi automatic with full automatic mode. I was responsible for the programming and electronics of the robot. We used ARM M7 based microcontroller Teensy 4.1. This Robot is a complete closed loop system with an active feedback to each mechanism. |
| Rabbit Robot- Robocon 2023 | Elephant Robot- Robocon 2023 |
|---|---|
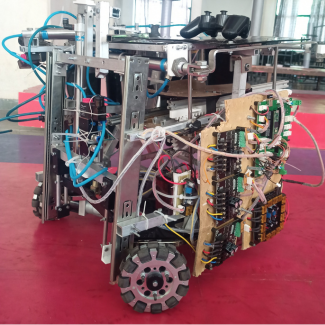 Semi Automatic Robot with complete closed loop system using teensy 4.1 as the main controller. The task of the robot was to pick the placed rings and throw into the targets. With a target to score maximum points. I supervised the electronics and programming of this Robot. Semi Automatic Robot with complete closed loop system using teensy 4.1 as the main controller. The task of the robot was to pick the placed rings and throw into the targets. With a target to score maximum points. I supervised the electronics and programming of this Robot. | 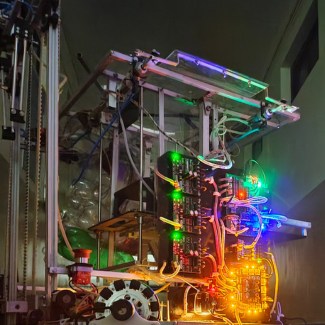 Semi Automatic Robot with complete closed loop system using teensy 4.1 as the main controller. The task of the robot was to pick the placed rings and throw into the targets. With a target to score maximum points. I supervised the electronics and programming of this Robot. Semi Automatic Robot with complete closed loop system using teensy 4.1 as the main controller. The task of the robot was to pick the placed rings and throw into the targets. With a target to score maximum points. I supervised the electronics and programming of this Robot. |
| Defense Robot- Robocon 2021 | Throwing Robot- Robocon 2021 |
|---|---|
 This was my first robot, it was semi automatic with a full automati mode. THe Robot had a complete closed loop system with Atmega 2560 as the main controller. I was responsible for the programming & automation of this robot. The task of the Robot was to pick, assist, defelect and throw arrows. |  It was semi automatic with a full automati mode. The Robot had a complete closed loop system with Atmega 2560 as the main controller. The task of the Robot was to pick and throw arrows. Please visit the videos section to watch the working videos of all the robots. It was semi automatic with a full automati mode. The Robot had a complete closed loop system with Atmega 2560 as the main controller. The task of the Robot was to pick and throw arrows. Please visit the videos section to watch the working videos of all the robots. |