Remote Labs for Robotics Education
Overview
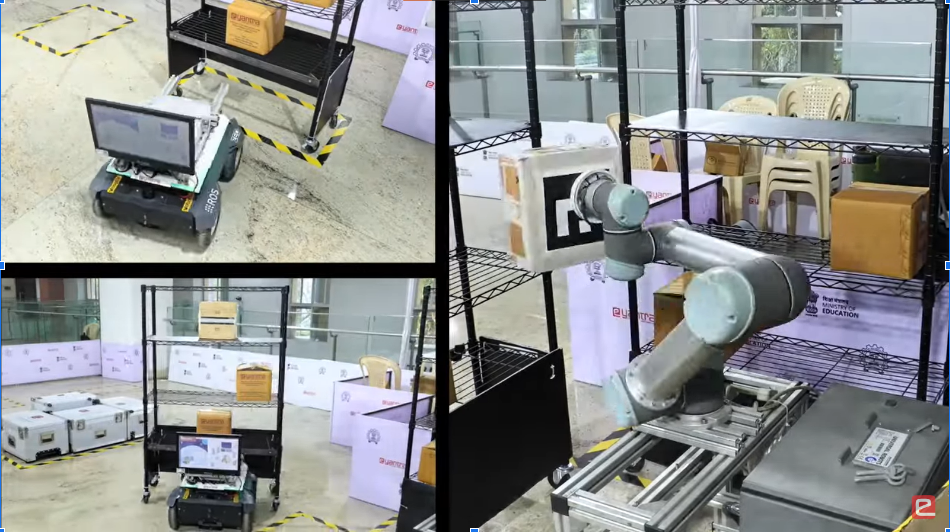
Our research focuses on developing these remote lab platforms and testing their efficacy by deploying them in our PBL-based competition called the e-Yantra Robotics Competition (eYRC). Our platforms were used by students to develop algorithms for an Autonomous Agricultural Harvester System (AAHS) and Autonomous Warehouse Management System (AWMS). These platforms helped students learn about image processing, navigation algorithms for mobile rovers, motion planning algorithms for manipulators, Proportional Integral Derivative (PID) controllers, and ROS. The major contributions of this work are as follows:
- Design of two low-cost, scalable, and customizable platforms using open-source tools for teaching industrial robotics remotely.
- Study our platforms’ effectiveness by deploying them in a PBL-based competition spread over six months with more than 1000 students.
Conclusion
In this paper, we present two remote platforms for teaching industrial robotics to students. Compared to previous work, our platforms use open-source tools and are tested with thousands of students. Testing these platforms as a part of our robotics competition, eYRC, showed that the finalist teams could develop fully autonomous algorithms for robots in a greenhouse and a warehouse with an average of 19.4 hours and 30.8 hours of remote hardware access, respectively.